Sensors, Free Full-Text
Por um escritor misterioso
Last updated 31 dezembro 2024
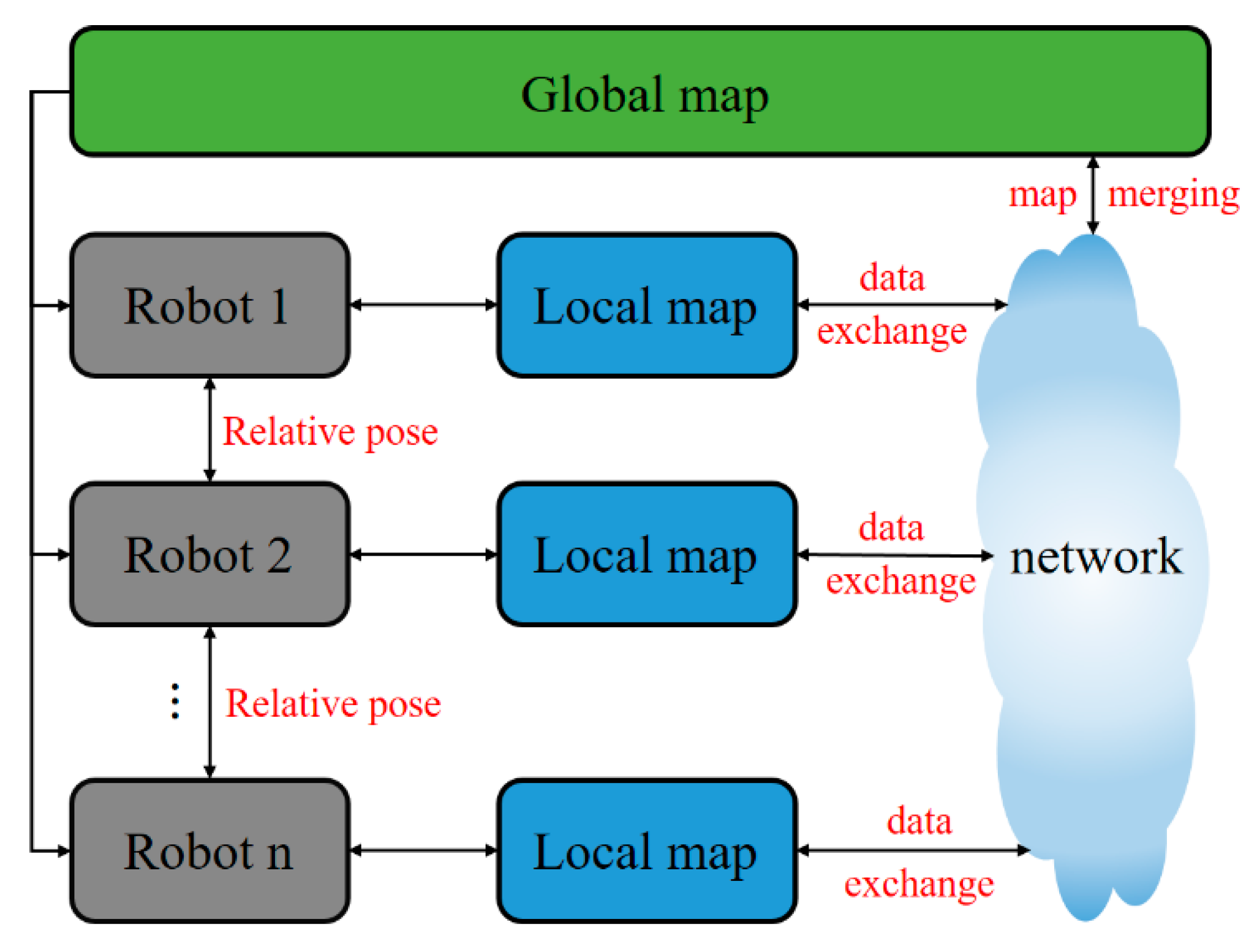
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

IMS Solution Zone Water Detection Sensor

Battery-free, wireless sensors for full-body pressure and
Sensors, Free Full-Text

Battery-free, wireless sensors for full-body pressure and

Ambient Weather WS-2000 Smart Weather Station

Sensors, Free Full-Text

data storage in iot –

Advanced Science - Wiley Online Library

MAP Sensor 079800-4250 Intake Air Pressure Sensor 079800-4220

Advanced Materials: Early View
Freestyle Libre 2 Sensor $160.93/Each Modern Medical Products

Health, Safety Monitoring - Vape Detector
Recomendado para você
-
 Festivais em 2023 — Ingresse31 dezembro 2024
Festivais em 2023 — Ingresse31 dezembro 2024 -
 Duda Ferrão Games31 dezembro 2024
Duda Ferrão Games31 dezembro 2024 -
canal da duda|Pesquisa do TikTok31 dezembro 2024
-
 Novo guia londres 2012 small 3 by Luis Ventura - Issuu31 dezembro 2024
Novo guia londres 2012 small 3 by Luis Ventura - Issuu31 dezembro 2024 -
 Duda Reis on Behance31 dezembro 2024
Duda Reis on Behance31 dezembro 2024 -
 Notícias - Plataforma das Instituições Comunitárias31 dezembro 2024
Notícias - Plataforma das Instituições Comunitárias31 dezembro 2024 -
 MINECRAFT#21 - PERDEMOS TUDO! A NOSSA CIDADE SUMIU.31 dezembro 2024
MINECRAFT#21 - PERDEMOS TUDO! A NOSSA CIDADE SUMIU.31 dezembro 2024 -
 Confira como estão os projetos de novas pistas de skate em31 dezembro 2024
Confira como estão os projetos de novas pistas de skate em31 dezembro 2024 -
Dota 2 - Available now to all Battle Pass owners who reach level31 dezembro 2024
-
 Catálogo Circuito Sesc de Artes 2021 - Praças Digitais by Sesc31 dezembro 2024
Catálogo Circuito Sesc de Artes 2021 - Praças Digitais by Sesc31 dezembro 2024


você pode gostar
-
A SHINY, AN ALTER FORM and a RAINBOW PIXELMON! #Minecraft #minecraftmo31 dezembro 2024
-
Rose Bronstein is just one of countless mothers seeking justice for a child lost to cyber abuse. Today, Rose joined Kristin Bride on…31 dezembro 2024
-
 Hunter x Hunter - Info Anime31 dezembro 2024
Hunter x Hunter - Info Anime31 dezembro 2024 -
 Caneca Personalizada com Nome para Professor Personal Trainer Crossfit - comemori31 dezembro 2024
Caneca Personalizada com Nome para Professor Personal Trainer Crossfit - comemori31 dezembro 2024 -
 The Office - Dunder Mifflin Paper Company Logo - Black | Metal Print31 dezembro 2024
The Office - Dunder Mifflin Paper Company Logo - Black | Metal Print31 dezembro 2024 -
 Salões de Beleza e Cabeleireiros em Diadema - perto de mim31 dezembro 2024
Salões de Beleza e Cabeleireiros em Diadema - perto de mim31 dezembro 2024 -
Espanha, Escócia e Turquia na fase final31 dezembro 2024
-
 Finalistas do prêmio de melhor jogador do ano do Fifa The Best : r31 dezembro 2024
Finalistas do prêmio de melhor jogador do ano do Fifa The Best : r31 dezembro 2024 -
 Jogo De Placas Em Madeira Com Corda 3 Peças Com Mensagens - Medo em Promoção na Americanas31 dezembro 2024
Jogo De Placas Em Madeira Com Corda 3 Peças Com Mensagens - Medo em Promoção na Americanas31 dezembro 2024 -
 Queen - One Piece Manga Panel black version Sticker for Sale by Geonime31 dezembro 2024
Queen - One Piece Manga Panel black version Sticker for Sale by Geonime31 dezembro 2024


